With Hall Sensors, Sleeve bearings
RC Servo motor
Please provide corresponding pinion gear or specify pinion paramenters for sample making.
BRS/BRT 17-18 Specifications
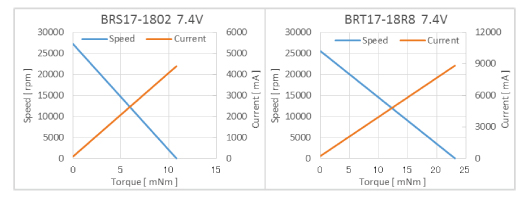
| Standard RC Servo MotorBRS17-1802 |
High torque RC Servo MotorBRT17-18R8 |
||||
|---|---|---|---|---|---|
| 1 | Nomal voltage | 7.4 | 7.4 | V | |
| 2 | No load speed | 27300 | 25500 | rpm | |
| 3 | No load current | 114 | 249 | mA | |
| 4 | Stall torque | 10.80 | 23.09 | mNm | |
| 5 | Stall current | 4.39 | 8.81 | mA | |
| 6 | Output power | 7.7 | 15.4 | W | |
| 7 | Max. efficiency | 70 | 69 | % | |
| 8 | Terminal resistance | 1.69 | 0.84 | Ω | |
| 9 | Friction torque | 0.88 | 0.67 | mNm | |
| 10 | Back-EMF constant | 70.409 | 0.282 | mV/rpm | |
| 11 | Torque constant | 7.73 | 2.70 | mNm/A | |
| 12 | Slope of N-T curve | 2523 | 1102 | rpm/mNm | |
| 13 | Mechanical time constant | 8.07 | 10.12 | ms | |
Mechanical data
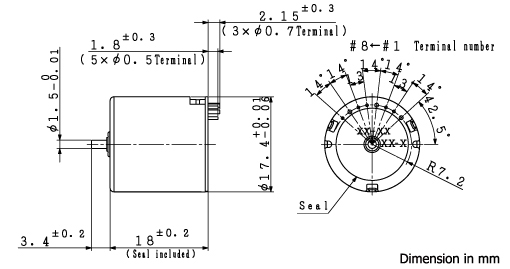
| 14 | Shaft axial play | 0.03~0.3 | mm |
| 15 | Shaft runout | ≦0.05 | mm |
| 16 | Operating temperature | -10~+50 | ℃ |
| 17 | Max coil temperature | 80 | ℃ |
| 18 | Bearing type | Sintered sleeve metal | |
| 19 | Weight | 22 | g |
*measured at () mm from flange
Other spec
| #1 | Motor winding W |
| #2 | Hall sensor output W |
| #3 | Input signal 3.8V -5.5V |
| #4 | Motor winding U |
| #5 | Hall sensor output V |
| #6 | GND |
| #7 | Motor winding V |
| #8 | Hall sensor output U |
*Reduction gear cannot be attached to this model.