LiDARとは 原理、方式、用途を解説
レーザーを用いて対象までの距離や形状を分析するLiDARは、気象学や地質学に古くから活用されてきました。近年では、自動車の先進運転支援システム(ADAS)や自動搬送車(AGV)、ロボットなどの分野で注目され、研究開発が進んでいます。
LiDARとは、レーザー光を用いたセンシング技術

LiDARは、レーザー光を用いた光センシング技術の1つです。「Light Detection And Ranging」、または「Laser Imaging Detection and Ranging」の頭文字をとったもので、「光検出と測距」、「レーザー画像検出と測距」などと訳されます。
LiDARでは、測定対象物に対してレーザー光を走査しながら照射し、光が反射して戻ってくるまでの時間を計測することで対象までの距離や方向、位置、形状などを測定します。対象物からの反射波を用いて距離や位置を測定する技術には、電波を用いたレーダー(Radio Detecting and Ranging:電波探知測距)があります。レーダーは、電波が反射しやすい金属製などの対象物は効率よく測定できますが、電波を吸収してしまうような物体や小さな物体の測定には不向きです。 電波よりも波長の短いレーザー光を利用しているLiDARは、雲の粒子のような微小な物体の測定も可能であり、より高い精度で位置や形状を測定することができます。このような性質を用いて、雲の動きの研究や、大気成分の濃度測定、地殻の変異の測定などの用途に用いられ、古くから気象学、地質学、海洋学、宇宙工学等の幅広い分野で活用されてきました。
小型、軽量化するLiDAR
LiDARは、レーザー光を広範囲に走査しながら照射し、光が反射して戻ってくるまでの時間を計測することで測定を行います。反射して戻ったレーザー光は、センサーにより無数の点として検知され、点の集合から3次元形状を描くことで、対象物までの距離や、位置、形状に加え、周囲の状況を正確に把握します。

Dllu, CC BY-SA 4.0 https://creativecommons.org/licenses/by-sa/4.0, via Wikimedia Commons
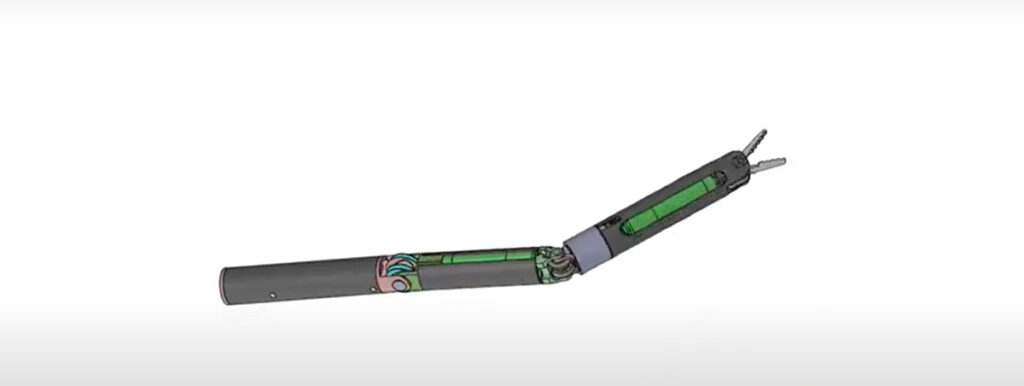
広範囲へのレーザー光の照射では、従来はレーザーモジュールをモーターで駆動させて360度回転させるメカニカル方式が使用されていました。メカニカル方式は、小型、軽量化が難しく、回転部が振動に対して弱い問題があります。例えば、自動運転に用いられる車載用LiDARでは、小型で振動に強く、高い耐久性が必要です。そのため、メカニカルな回転機構を無くし、半導体技術や光学技術で回転機構を置き換えた、ソリッドステート方式のLiDARが開発され、車載用では現在主流になっています。ソリッドステート方式は、検知範囲が狭くなりますが、小型化が容易なため設置場所の自由度が高く、複数のLiDARを用いることでメカニカル方式と同様に360度方向をカバーすることが可能です。
ソリッドステート方式の1つに、MEMS(Micro Electro Mechanical Systems:微小電気機械システム)技術を用いた電磁式ミラーによる、MEMS方式のLiDARがあります。電磁式ミラーは、磁力によりミラーを駆動させるため、振動に強く、高速高精度にレーザー光の照射方向を変えることが可能です。MEMS方式のLiDARでは、水平方向にレーザー走査を行うラスタースキャンタイプと、ミラーをらせん状に動かすウォブリングスキャンタイプがあります。ラスタースキャンタイプは、遠距離の測定に向いており、ウォブリングスキャンタイプは、近距離、広範囲の測定に向いています。
LiDARの用途
LiDARは多くの分野で活用されています。例えば、気象学、地質学では、LiDARを人工衛星や航空機に搭載して、地上に向かってレーザー光を照射して測定が行われていました。近年では、ソリッドステート方式による小型軽量のLiDARをドローンに搭載することで、手軽に低高度で測定する技術も開発されています。これを用いて、道路や橋などのインフラの変異を測定してメンテナンスに役立てることや、災害時に土砂崩れした崖の表面を短時間で正確に把握し、安全、迅速な救助活動に活用することも行われるようになりました。
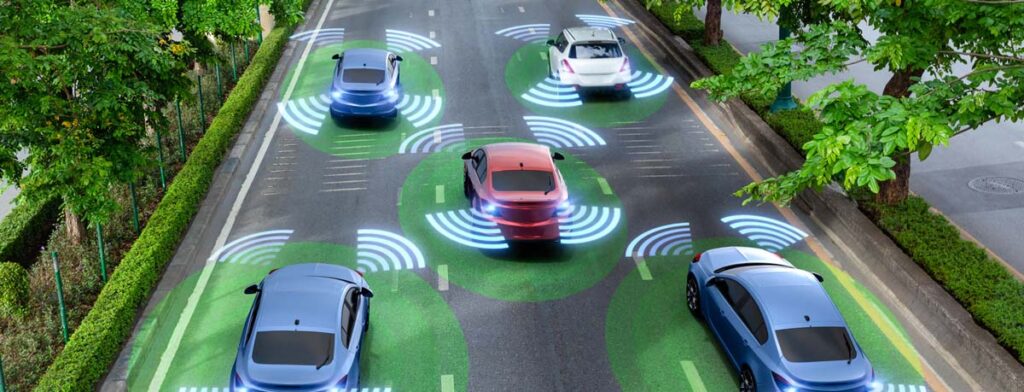
また近年では、ADASやAGV、ロボットなどの分野において、人や物などの障害物の検知への活用が期待されています。自動運転における障害物の検知の研究では、カメラによる画像認識とミリ波レーダーを組み合わせたシステムによるものが多く行われていました。
カメラによる画像認識では、人の目と同じように障害物を検知できますが、障害物との正確な距離を測定することが困難です。また、人の目と同様に雨天時の視界不良や暗闇、逆光等に弱く、レンズの汚れでも精度が落ちます。
ミリ波レーダーは、雨や霧も通過できるため悪天候にも強く、明るさや視界不良には影響されません。しかし、方位に対する精度が低く、樹木のような電波反射率の低い物体や小さな物体の検知には不向きです。
位置、距離、3次元形状を広範囲にわたって高精度に測定できるLiDARは、これらの短所を補い、3つの方式を組み合わせることで、より正確に障害物を検知できるようになります。より高度な自動運転の実現には小型軽量化されたLiDARは不可欠です。
しかし、現状のLiDARは非常に高価なものであり、今後の更なる普及のためには低コスト化も課題となっています。低コスト化の一つの手段として、短期量産化が可能なMEMS光デバイス製造技術の更なる活用が期待されています。

お問い合せは下記フォームに入力し、確認ボタンを押して下さい。
※お問い合わせフォームからのセールス等はお断りいたします。送信いただいても対応いたしかねます。