手術用ロボット:小型モーター(マイクロモーター)と精度の関連性

手術用ロボットの市場動向についてご紹介した前編【手術用ロボット:絶えず拡大する市場の動向】に続き、今回の後編では手術用ロボットと小型モーター(マイクロモーター)の関わりについてご説明します。
目次 [閉じる]
高精度の動きを可能にするDC小型モーター
手術用ロボットは、ドクターが繊細で高精度の動きを実行できるように開発されたシステムです。ただし、手術用ロボットは、独自で決定を下したり、切開を行ったりすることはありません。ロボットに何をすべきかを指示するのは執刀医であり、現在ではかなり高い精度の手術が可能になってきています。

By Cmglee - Own work, CC BY-SA 3.0, Link
システムの中心にはDC小型モーターがあります。小型化されたシステムの目標は、最小のスペースで高い精度を達成することです。これは、執刀医の指示に迅速かつ正確に応答する必要があります。 精密な動きは、DC小型モーターとDC小型モーターのシステムで実現されます。 DC小型モーターは、高精度を実現するために、高品質の磁石とコイルのセットを備え、高い応答性を実現するとともに、構造的にねじれの影響を低減して位置決め精度を高めています。
産業用ロボットは、主に反復的で危険なマクロスケールの製造タスクを自動化するように設計されていますが、医療用ロボットは、まったく異なる環境や操作で使用するように設計されています。
人間よりも器用さと可動域が大きいロボット装置により、ドクターが手の届きにくい場所で繊細な手術を成功させることができます。したがって、大規模な機械システムで構築された従来のロボットとは異なり、医療用ロボットでは、小型化された部品とインテリジェントな材料を使用する必要があります。
医療用マイクロロボット、新しいフロンティア
マイクロロボットの進歩により、精密手術用のより小型のデバイスを作ることが可能になりました。治療しなければならない生物学的実体の寸法に匹敵する寸法を備えたマイクロロボットは、高精度の低侵襲手術に重要な利点を提供します。さまざまなエネルギー源を動力源とするマイクロロボットは、ナノメートルスケールで動作し、時には細胞組織に直接作用することもあります。
大型のロボットとは異なり、これらの小さなロボットは、体の最も細い毛細血管までナビゲートされ、細胞レベルまで手順を実行できます。磁気駆動マイクロボットは、磁場によって厚い生体組織に侵入できるため、低侵襲の生体内手術にも大きな期待が寄せられています。
触覚フィードバックの問題
高度な画像システム、コンピューター断層撮影またはMRIデータを使用する機能、洗練されたデザインは、医療ロボットの最も目を引く部分かもしれませんが、ドクターに複雑な実行に必要な器用さを提供するのは、小さな隠れた内部コンポーネントです。ただし、初期の医療用ロボットの設計では、ドクターは触覚フィードバックを得ることができませんでした。ドクターは、傷口を縫合したときの力加減や、手術器具を使用して臓器に加えた圧力を知ることができませんでした。
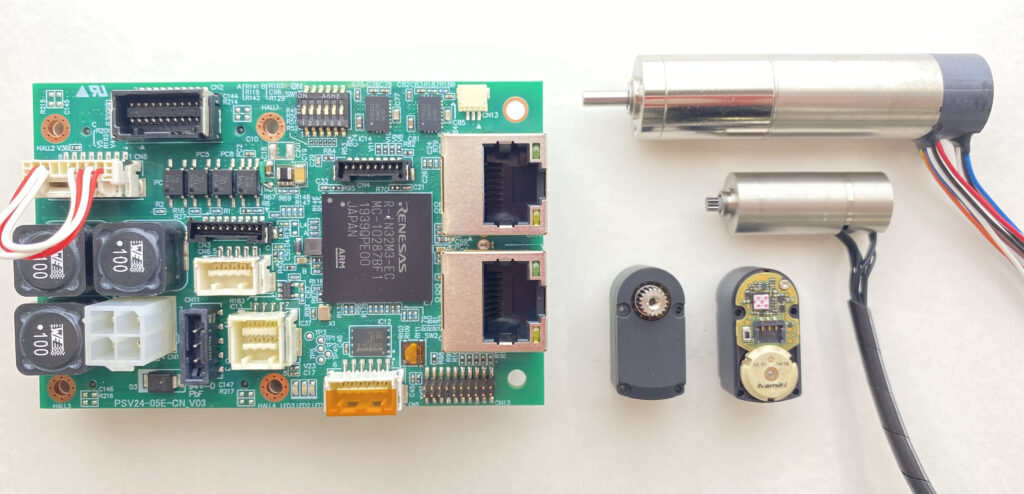
小型モーター(マイクロモーター)の役割

触覚フィードバックの問題を解決するには、線形DCサーボモーターと小型モーター(マイクロモーター)を使用して手術器具の動きを制御することにより、設計段階で大量の作業が必要でした。このようなモーターは非常に小さいですが、かなりの力を与えることができます。
たとえば、ブラシレスDCマイクロモーターの直径は16mmで、最大3.9mNmの連続トルクを生成します。これらは最大24Vの電圧で給電され、無負荷速度は21,000 rpmを超える可能性があり、ストールトルクは35mNmを超える可能性があります。また、磁気エンコーダやギヤボックスが統合されます。
ドクターが手動制御を操作するときに手術用ロボットに動きを提供するのはこれらのモーターです。
電子機器は、ソフトウェア制御下でリニアサーボモーターと小型モーターを管理します。キネマティックコントローラー、位置検出、力検出、ひずみゲージが触覚フィードバックシステムを完成させ、外科医が患者に物理的に触れることなく操作するために必要な触覚感覚情報を提供します。
繰り返し作業時でも高精度を実現
ロボットには、まったく同じ方法で動きを繰り返す超人的な能力があります。これは、例えば、植毛手術で非常に役立ちます。
ロボットは毛包を収集し、頭皮の標的領域に毛包ユニットを移植します。統合された力検出により、ロボットは毛包収集および移植中に必要な力を維持します。
Orbrayは小型モーター(マイクロモーター)を取り扱っております。
DCコアレスモーターのページはこちら
お問い合せは下記フォームに入力し、確認ボタンを押して下さい。
※お問い合わせフォームからのセールス等はお断りいたします。送信いただいても対応いたしかねます。